We provide ground truth poses from a motion capture system at 120Hz during the beginning and end of each sequence, which can be used for trajectory evaluation. TUM-VIE includes challenging sequences where state-of-the art visual SLAM algorithms either fail or result in large drift.
As demonstrated on both simulated and real data, our algorithm achieves accurate and robust estimates of the vehicle’s instantaneous rotational velocity, and thus results that are comparable to the delta rotations obtained by frame-based sensors under normal conditions. We furthermore significantly outperform the more traditional alternatives in challenging illumination scenarios.
This paper proposes a simple but effective event-based pose estimation system using active LED markers (ALM) for fast and accurate pose estimation. The proposed algorithm is able to operate in real time with a latency below 0.5 ms while maintaining output rates of 3 kHz.
Event cameras do not suffer as much from motion blur, thanks to their high temporal resolution. Moreover, the sparse nature of the event stream solves communication bandwidth limitations many frame cameras face. To the best of our knowledge, we present the first method for table tennis spin estimation using an event camera. We use ordinal time surfaces to track the ball and then isolate the events generated by the logo on the ball.
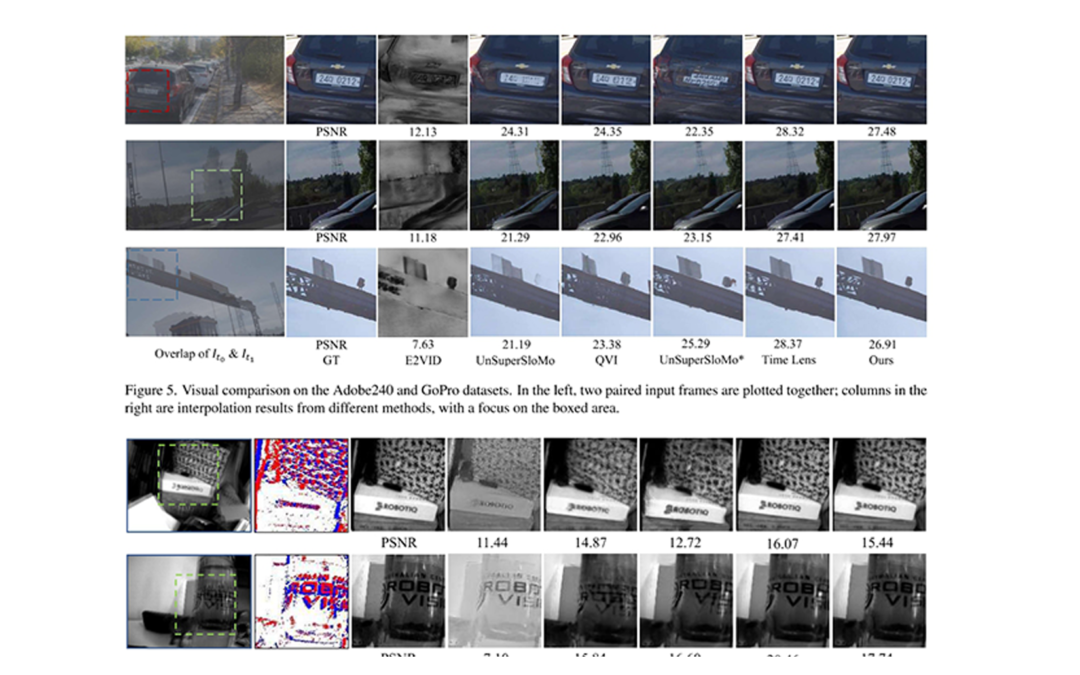
The pioneering work Time Lens introduced event cameras to video interpolation by designing optical devices to collect a large amount of paired training data of high-speed frames and events, which is too costly to scale. To fully unlock the potential of event cameras, this paper proposes a novel TimeReplayer algorithm to interpolate videos captured by commodity cameras with events.