This collaboration combines Tobii’s best-in-class eye tracking platform with Prophesee’s pioneering event-based sensor technology. Together, the companies aim to develop an ultra-fast and power-efficient eye-tracking solution, specifically designed to meet the stringent power and form factor requirements of compact and battery-constrained smart eyewear.
The paper evaluates Prophesee’s 3rd-generation event-based cameras for space domain awareness, showing potential for efficient, low-power temporal sensing despite sensitivity limits.
In this paper, the traditional techniques of conventional astronomy are reconsidered to properly utilise the event-based camera for space imaging and space situational awareness.
This paper addresses these challenges by introducing a novel motion segmentation method that leverages self-supervised vision transformers on both event data and optical flow information. Our approach eliminates the need for human annotations and reduces dependency on scene-specific parameters.
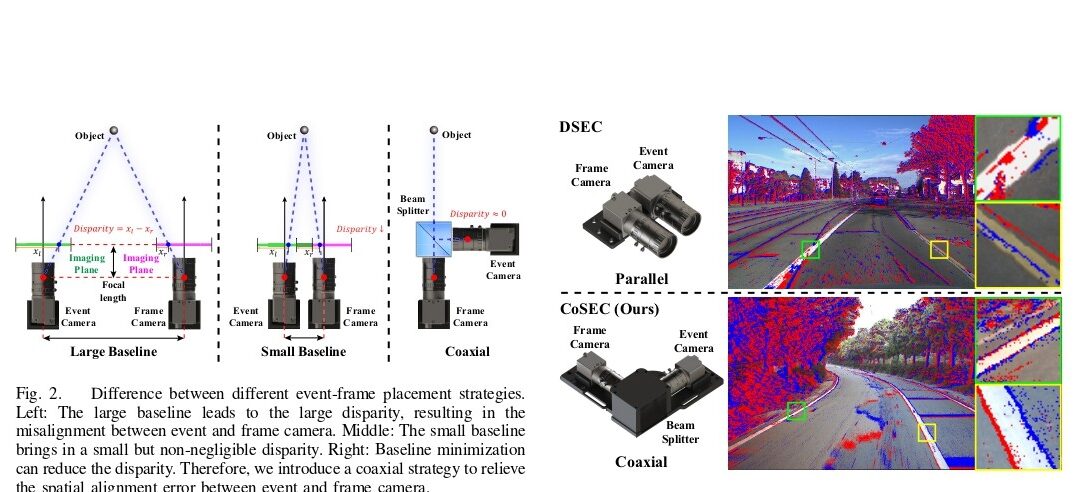
This paper introduces hybrid coaxial event-frame devices to build the multimodal system, and propose a coaxial stereo event camera (CoSEC) dataset for autonomous driving. As for the multimodal system, it first utilizes the microcontroller to achieve time synchronization, and then spatially calibrate different sensors, where they perform intra- and inter-calibration of stereo coaxial devices.