This paper presents F-UAV-D (Fast Unmanned Aerial Vehicle Detector), an embedded system that enables fast-moving drone detection. In particular, we propose a setup to exploit DVS as an alternative to RGB cameras in a real-time and low-power configuration. Our approach leverages the high-dynamic range (HDR) and background suppression of DVS.
To investigate the causes of declining insect populations, a monitoring system is needed that automatically records insect activity and additional environmental factors over an extended period of time. For this reason, we use a sensor-based method with two event cameras. In this paper, we describe the system, the view volume that can be recorded with it, and a database used for insect detection.
Deep Event Visual Odometry sparsely tracks selected event patches over time. A key component of DEVO is a novel deep patch selection mechanism tailored to event data. We significantly decrease the pose tracking error on seven real-world benchmarks by up to 97% compared to event-only methods and often surpass or are close to stereo or inertial methods.
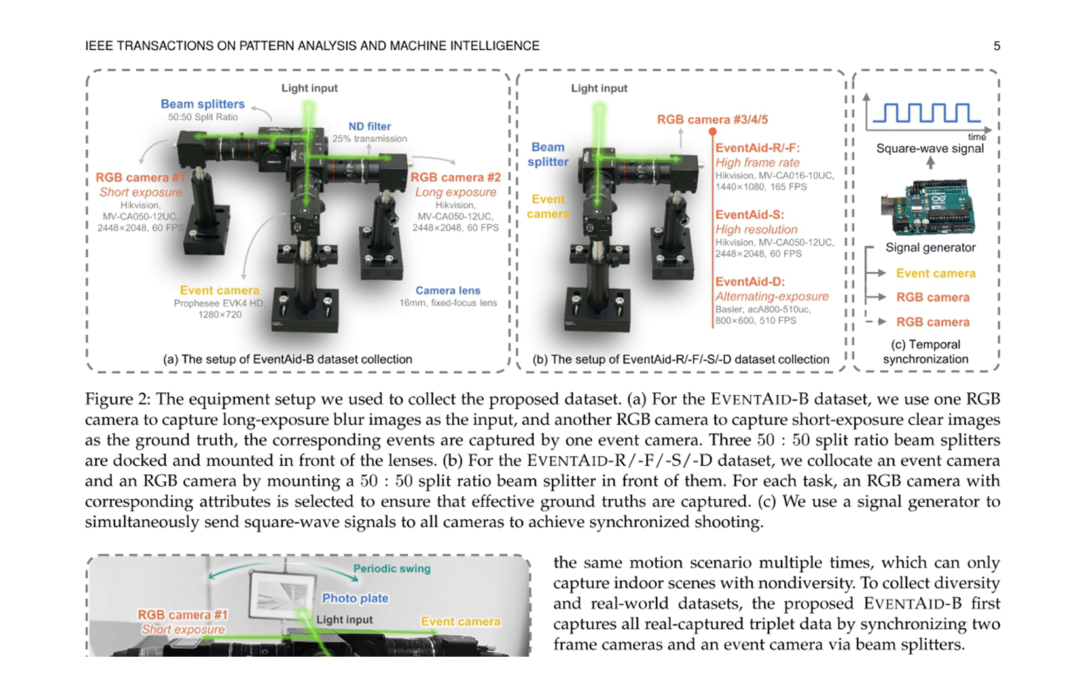
This paper focuses on five event-aided image and video enhancement tasks (i.e., event-based video reconstruction, event-aided high frame rate video reconstruction, image deblurring, image super-resolution, and high dynamic range image reconstruction), provides an analysis of the effects of different event properties, a real-captured and ground truth labeled benchmark dataset.
The proposed system is designed using a transmitter-centric information-theoretic criterion that targets a reduction of the communication overhead, while retaining the most relevant information for the end-to-end semantic task of interest. Numerical results on standard data sets validate the proposed architecture, and a preliminary testbed realization is reported.
Our model outperforms by a large margin feed-forward event-based architectures. Moreover, our method does not require any reconstruction of intensity images from events, showing that training directly from raw events is possible, more efficient, and more accurate than passing through an intermediate intensity image.