Terranet’s new BlincVision MVP leverages Prophesee’s event-based vision to deliver ultra-low-latency sensing for safer urban mobility and improved hazard detection.
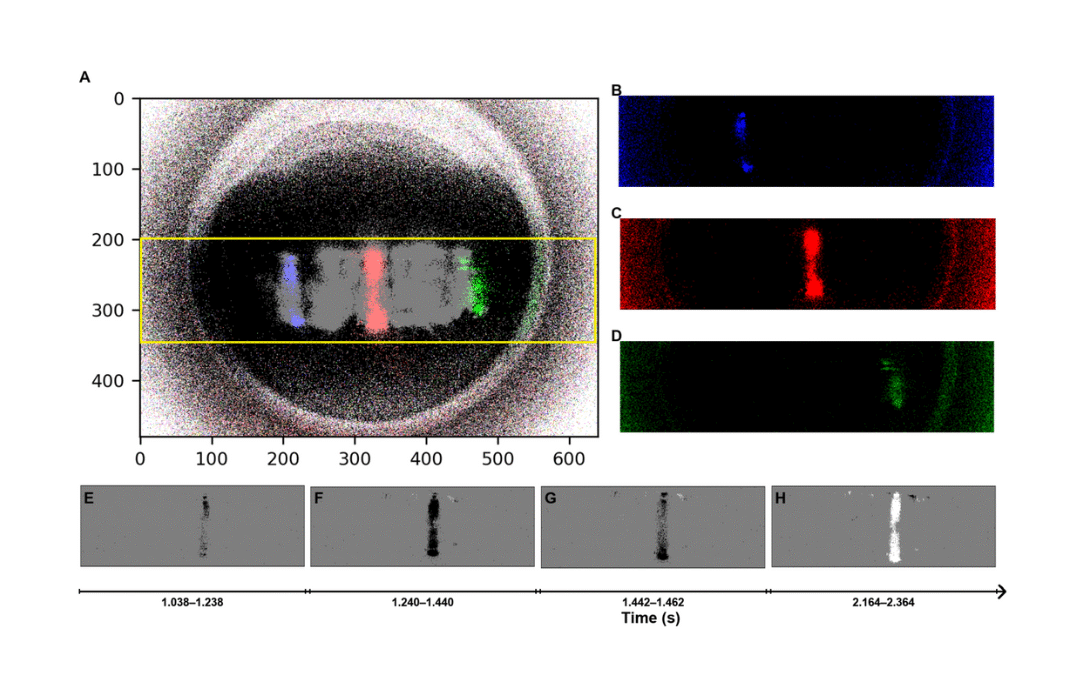
This paper presents an event-based opto-tactile skin, a neuromorphic tactile sensing system that integrates dual dynamic vision sensors (DVS) with a flexible optical waveguide to enable high-speed, low-latency touch detection over large areas of soft robotic surfaces. The system leverages sparse event streams for press localization, using clustering-based triangulation to achieve accurate tactile mapping with minimal computational overhead. Experimental results demonstrate reliable contact detection and localization across a 100 cm² sensing area, highlighting its potential for real-time, energy-efficient soft robotics applications.
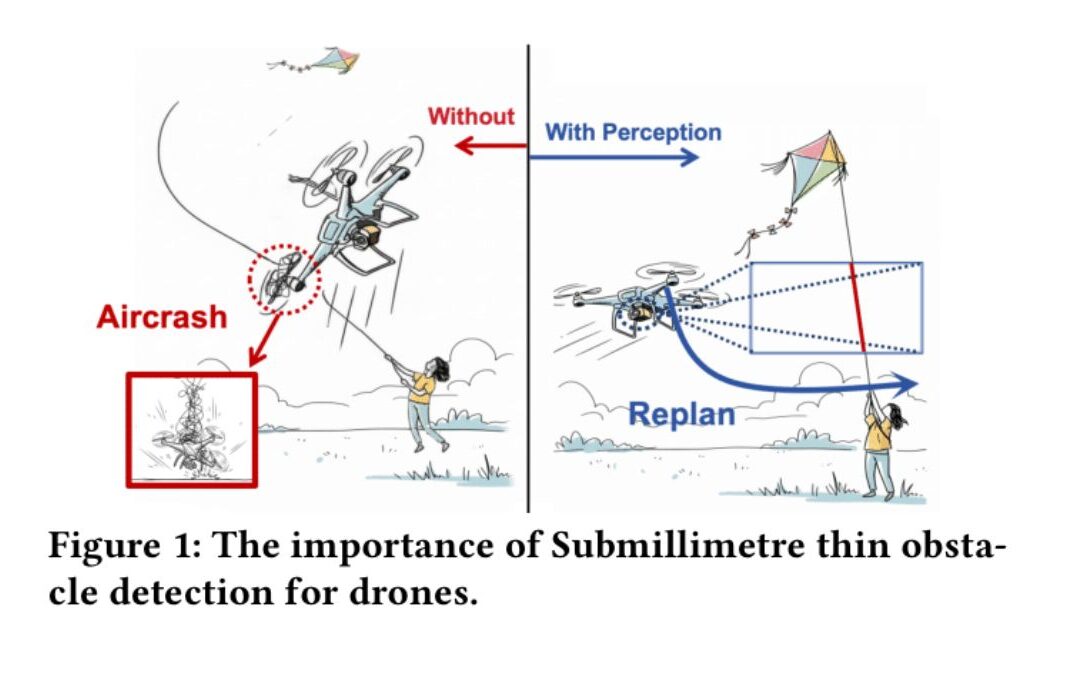
This paper introduces SkyShield, an event-driven framework for detecting submillimeter-scale thin obstacles—such as steel wires and kite strings—that endanger autonomous drones in complex environments. Using the high temporal resolution of event-based cameras, SkyShield leverages a lightweight U-Net and a novel Dice-Contour Regularization Loss to accurately capture thin structures in event streams. Experiment results show a mean F1 score of 0.7088 with 21.2 ms latency, making the approach well suited for real-time, edge, and mobile drone applications.
Prophesee appoints Jean Ferré as Chief Executive Officer as the company enters a new phase of commercialization and growth, building on a strong technological and organizational foundation and welcoming new investors. The company is sharpening its near-term focus on sectors with high value use cases demonstrating today the strongest demand and adoption momentum such as security, defense and aerospace, as well as industrial automation.