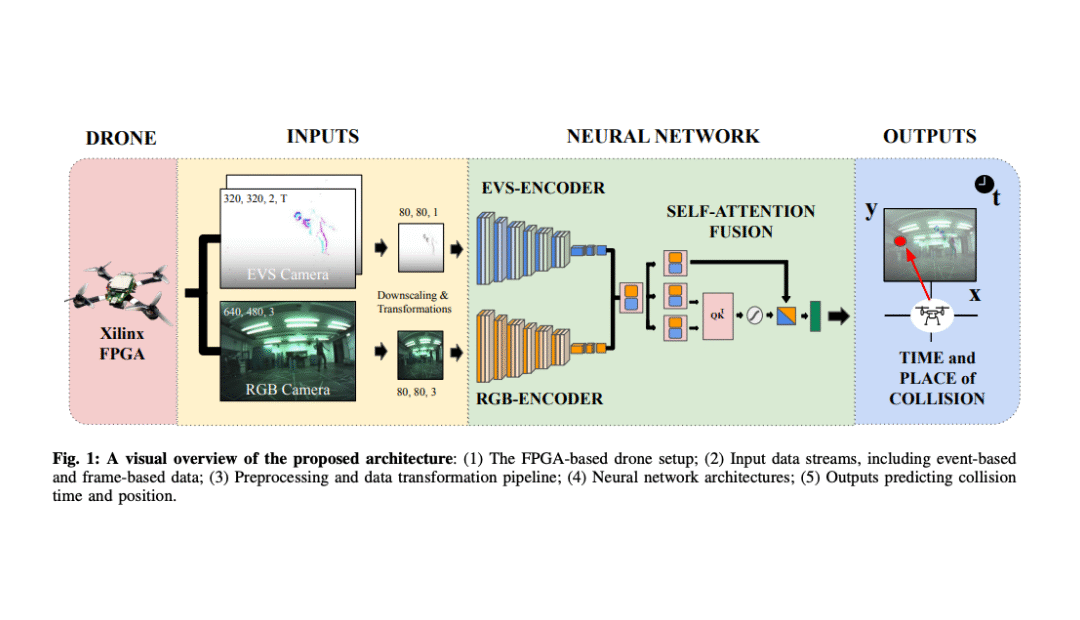
This paper proposes a neural network framework for predicting the time and collision position of an unmanned aerial vehicle with a dynamic object, using RGB and event-based vision sensors. The proposed architecture consists of two separate encoder branches, one for each modality, followed by fusion by self-attention to improve prediction accuracy. To facilitate benchmarking, the ABCD dataset is leveraged, enabling detailed comparisons of single-modality and fusion-based approaches.
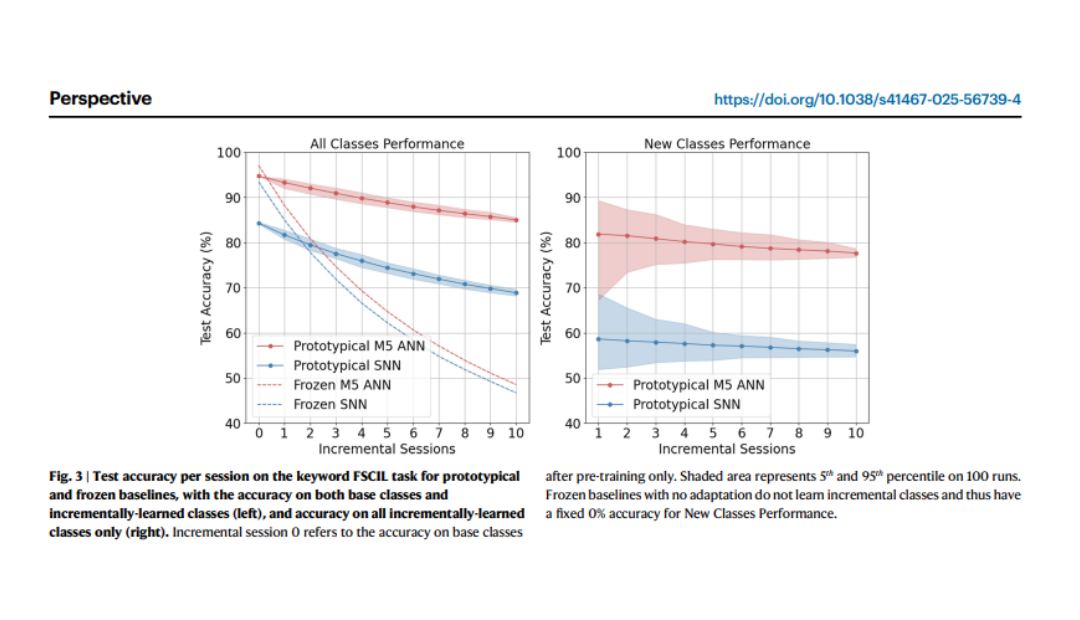
This article presents NeuroBench, a benchmark framework for neuromorphic algorithms and systems. It introduces a common set of tools and systematic methodology for inclusive benchmark measurement, delivering an objective reference framework for quantifying neuromorphic approaches in both hardware-independent and hardware-dependent settings.
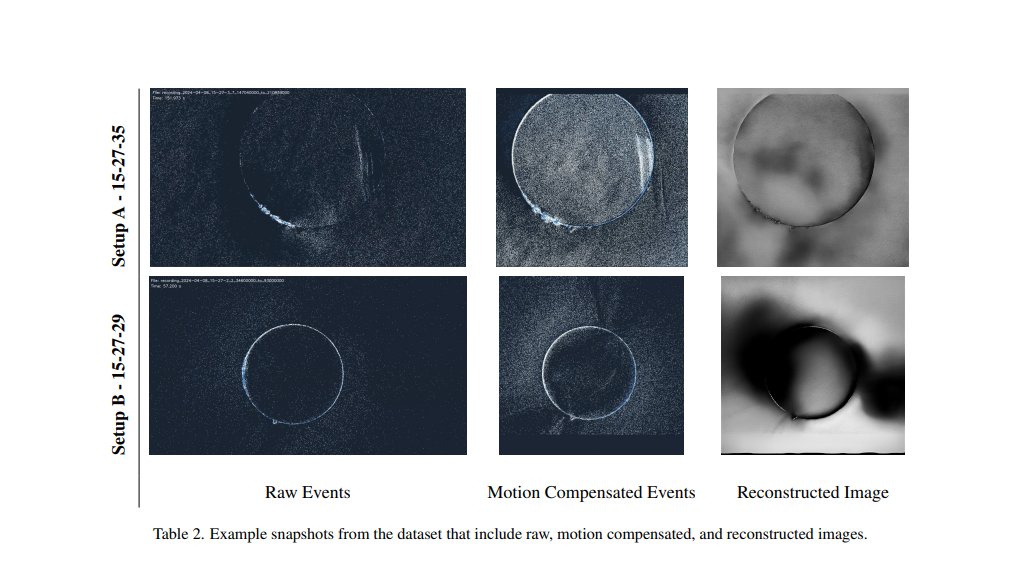
This paper presents the first recording of a total solar eclipse with a pair of high-resolution event cameras, with accompanying methodology. A method is proposed to stabilize the recordings to counteract manual tripod adjustments required to track celestial bodies in-frame. A high-dynamic range image of the sun is also generated during the eclipse, showing how event cameras excel in this aspect compared to traditional CMOS-based cameras.
Prophesee announces the GenX320 Starter Kit for Raspberry Pi 5, making event-based vision accessible to the Raspberry Pi developer community for the first time. Built around Prophesee’s ultra-compact, ultra-efficient GenX320 event-based vision sensor, the kit connects directly to the Raspberry Pi 5 camera connector to allow development of real-time applications that leverage the advantages of event-based vision for drones, robotics, industrial automation, surveillance, and more.
7invensun’s aSee Glasses-EVS integrate Prophesee’s GenX320 event-based sensor, enabling up to 1000Hz eye movement sampling rate in a compact, lightweight wearable form factor. Designed for neuroscience, sports science, medical diagnosis, and cognitive research, the device offers high temporal precision and extended wearability for advanced human behavior studies.