The MSMO algorithm uses the velocities of each event to create an average of the scene and filter out dissimilar events. This work shows the study performed on the velocity values of the events and explains why ultimately an average-based velocity filter is insufficient for lightweight MSMO detection and tracking of objects using an EBS camera.
This paper introduces the first self-supervised neuromorphic super-resolution prototype. It can be self-adaptive to per input source from any low-resolution camera to estimate an optimal, high-resolution counterpart of any scale, without the need of side knowledge and prior training.
This paper presents the implementation of time-resolved velocity profile measurement using event-based vision
(EBV) employing an event-camera in-place of a high-speed camera.
In this paper, we propose a method for event data that is capable of removing approximately 99% of noise while preserving the majority of the valid signal. It proposes four algorithms based on the matrix of infinite impulse response (IIR) filters method.
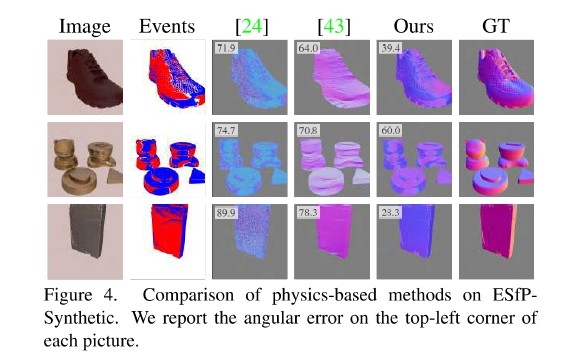
This paper investigates event-based shape from polarization using Spiking Neural Networks (SNNs), introducing the Single-Timestep and Multi-Timestep Spiking UNets for effective and efficient surface normal estimation.
This paper introduces a groundbreaking low-complexity lossless compression method for encoding asynchronous event sequences, designed for efficient memory usage and low-power hardware integration.