This paper highlighted at CVPR 2025 presents EBS-EKF, an event-based star tracking algorithm combining a novel star centroiding method with an extended Kalman filter. Evaluated on real night-sky data using a Prophesee EVK4-HD event camera synchronized with a space-ready APS star tracker, the method demonstrates improved accuracy, higher-frequency updates and greater motion tolerance for spacecraft attitude estimation.
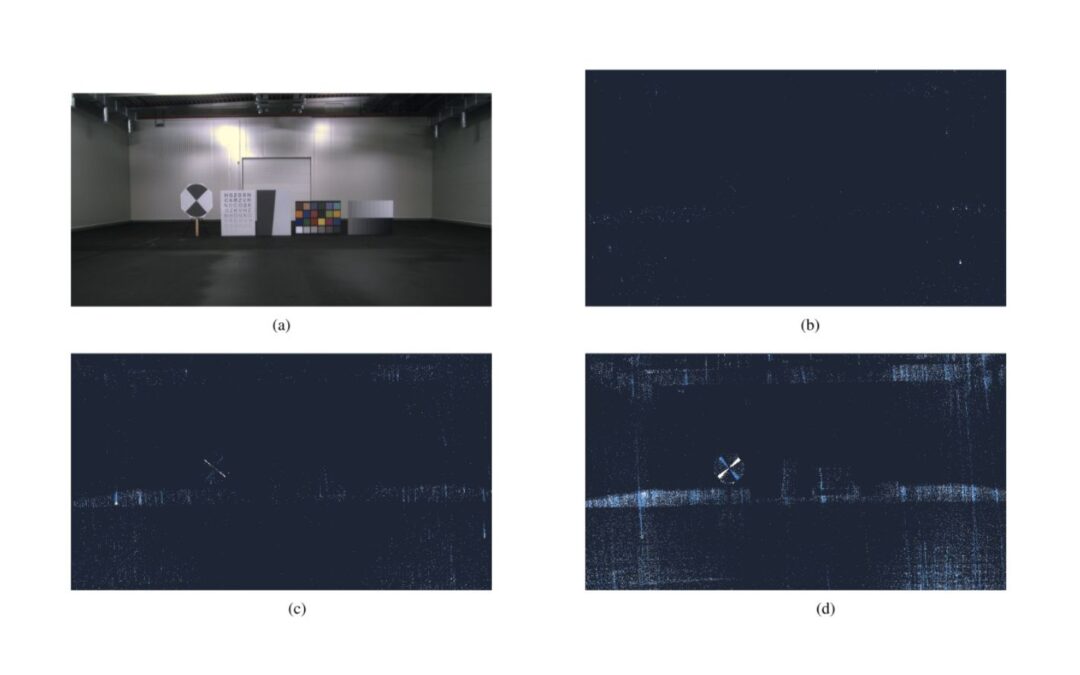
This paper investigates the performance of event-based vision sensors under adverse weather conditions relevant to ADAS applications. Through controlled tests across varying rainfall rates, fog visibility levels, ambient light, and target distances, the study evaluates how rain and fog affect sensor output and shows how camera settings can help mitigate rain-related effects.
IDS and Prophesee have signed a Letter of Intent to deepen collaboration on next-generation industrial vision systems combining conventional imaging with event-based sensing for faster, more accurate and power-efficient machine vision.
Terranet’s new BlincVision MVP leverages Prophesee’s event-based vision to deliver ultra-low-latency sensing for safer urban mobility and improved hazard detection.
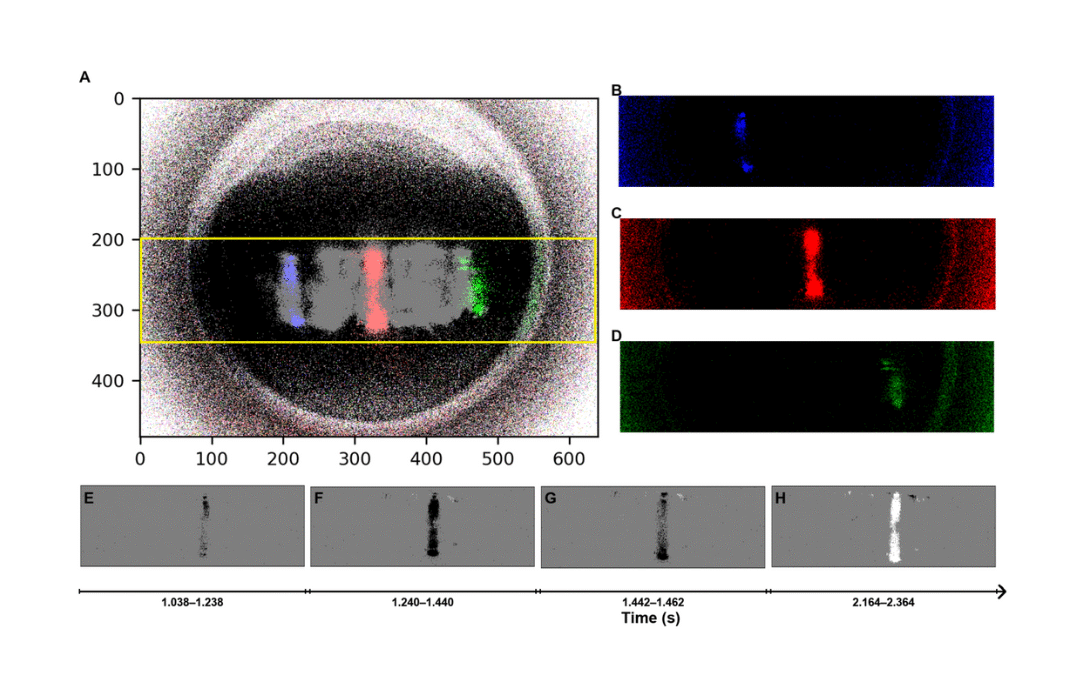
This paper presents an event-based opto-tactile skin, a neuromorphic tactile sensing system that integrates dual dynamic vision sensors (DVS) with a flexible optical waveguide to enable high-speed, low-latency touch detection over large areas of soft robotic surfaces. The system leverages sparse event streams for press localization, using clustering-based triangulation to achieve accurate tactile mapping with minimal computational overhead. Experimental results demonstrate reliable contact detection and localization across a 100 cm² sensing area, highlighting its potential for real-time, energy-efficient soft robotics applications.