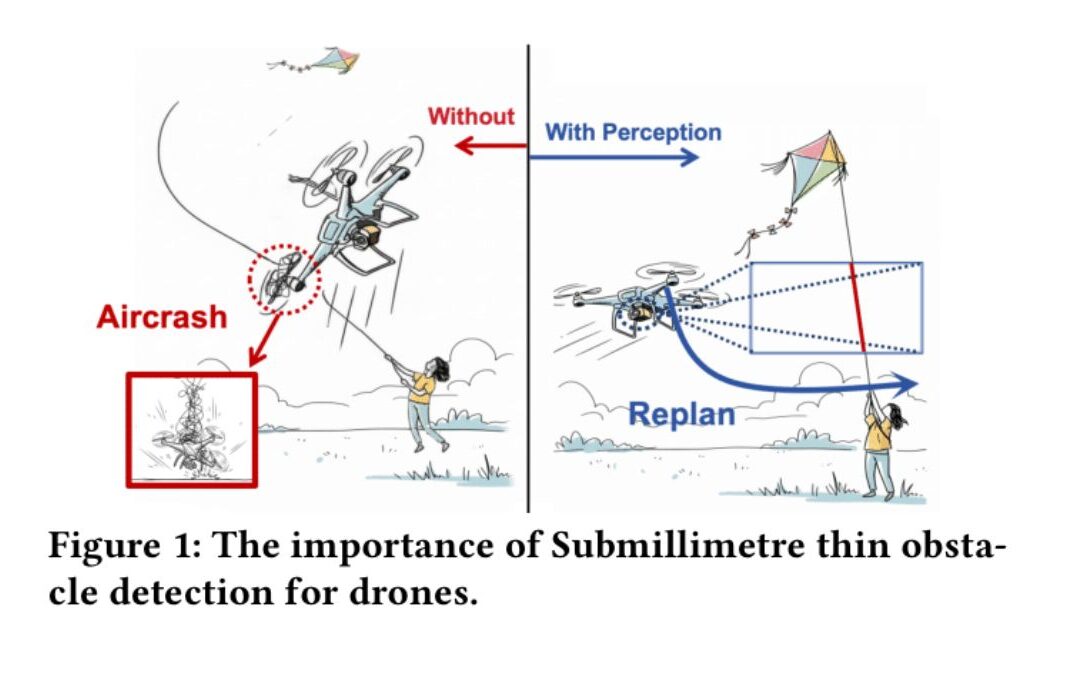
This paper introduces SkyShield, an event-driven framework for detecting submillimeter-scale thin obstacles—such as steel wires and kite strings—that endanger autonomous drones in complex environments. Using the high temporal resolution of event-based cameras, SkyShield leverages a lightweight U-Net and a novel Dice-Contour Regularization Loss to accurately capture thin structures in event streams. Experiment results show a mean F1 score of 0.7088 with 21.2 ms latency, making the approach well suited for real-time, edge, and mobile drone applications.
Prophesee appoints Jean Ferré as Chief Executive Officer as the company enters a new phase of commercialization and growth, building on a strong technological and organizational foundation and welcoming new investors. The company is sharpening its near-term focus on sectors with high value use cases demonstrating today the strongest demand and adoption momentum such as security, defense and aerospace, as well as industrial automation.
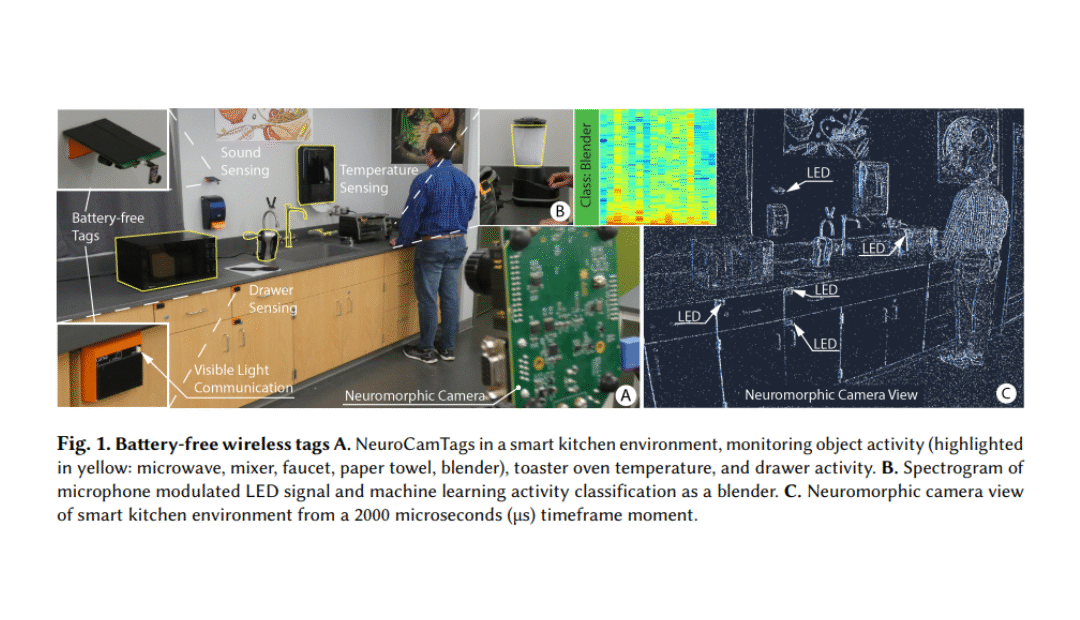
In this paper, NeuroCamTags introduces a battery-free platform designed to detect a range of human interactions and activities in entire rooms and floors without batteries. The system comprises low-cost tags that harvest ambient light energy and utilize high-frequency LED modulation for wireless communication. Visual signals are captured by a neuromorphic camera with high temporal resolution. NeuroCamTags enables localization and identification of multiple tags, offering battery-free sensing for temperature, contact, button presses, key presses, and sound cues, with accurate detection up to 200 feet.
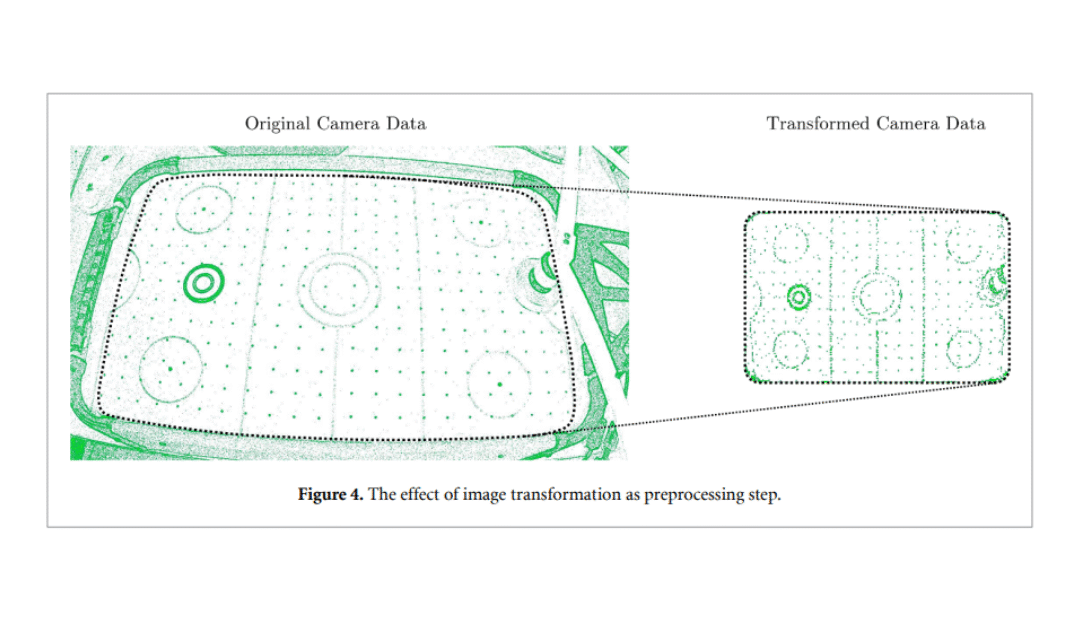
This paper focuses on using spiking neural networks (SNNs) to control a robotic manipulator in an air-hockey game. The system processes data from an event-based camera, tracking the puck’s movements and responding to a human player in real time. It demonstrates the potential of SNNs to perform fast, low-power, real-time tasks on massively parallel hardware. The air-hockey platform offers a versatile testbed for evaluating neuromorphic systems and exploring advanced algorithms, including trajectory prediction and adaptive learning, to enhance real-time decision-making and control.