Deep Event Visual Odometry sparsely tracks selected event patches over time. A key component of DEVO is a novel deep patch selection mechanism tailored to event data. We significantly decrease the pose tracking error on seven real-world benchmarks by up to 97% compared to event-only methods and often surpass or are close to stereo or inertial methods.
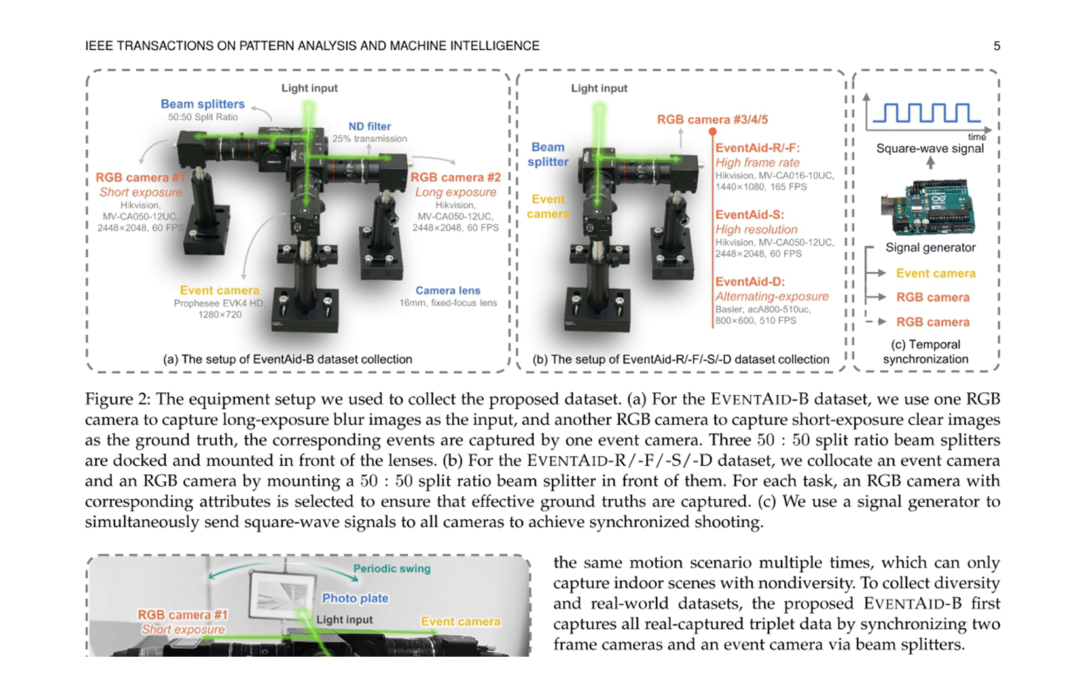
This paper focuses on five event-aided image and video enhancement tasks (i.e., event-based video reconstruction, event-aided high frame rate video reconstruction, image deblurring, image super-resolution, and high dynamic range image reconstruction), provides an analysis of the effects of different event properties, a real-captured and ground truth labeled benchmark dataset.
With Metavision SDK5 PRO, evaluate, design and sell your own Metavision product. Now included at no additional cost in both binaries and source form with every Prophesee USB EVK purchase.
Prophesee, inventor of the most advanced neuromorphic vision systems, will showcase new products with AMD, CIS, IDS, Lucid Vision Labs and the industry’s first automated defect detection demo together with Japanese expert Luci.
The proposed system is designed using a transmitter-centric information-theoretic criterion that targets a reduction of the communication overhead, while retaining the most relevant information for the end-to-end semantic task of interest. Numerical results on standard data sets validate the proposed architecture, and a preliminary testbed realization is reported.