In this paper, we propose a method for event data that is capable of removing approximately 99% of noise while preserving the majority of the valid signal. It proposes four algorithms based on the matrix of infinite impulse response (IIR) filters method.
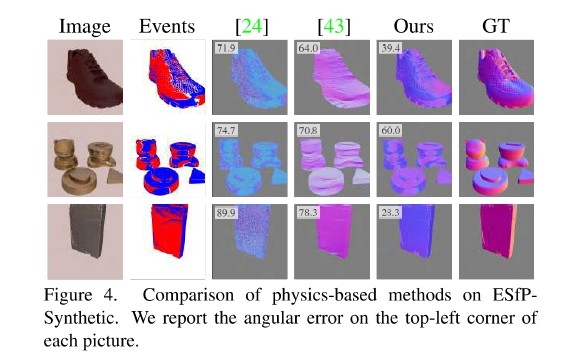
This paper investigates event-based shape from polarization using Spiking Neural Networks (SNNs), introducing the Single-Timestep and Multi-Timestep Spiking UNets for effective and efficient surface normal estimation.
This paper introduces a groundbreaking low-complexity lossless compression method for encoding asynchronous event sequences, designed for efficient memory usage and low-power hardware integration.
This paper tackles the speed-resolution trade-off using event cameras. Event cameras are efficient highspeed vision sensors that asynchronously measure changes in brightness intensity with microsecond resolution.
This paper tackles the speed-resolution trade-off using event cameras. Event cameras are efficient highspeed vision sensors that asynchronously measure changes in brightness intensity with microsecond resolution.